
Copyright 2019 Reflux Design
MBBL Mesh For PIC
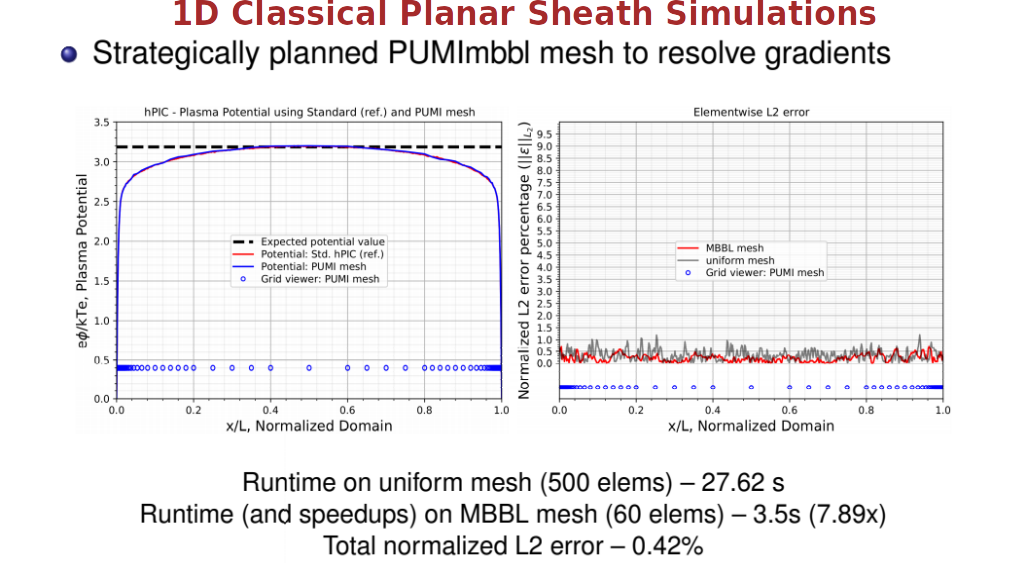
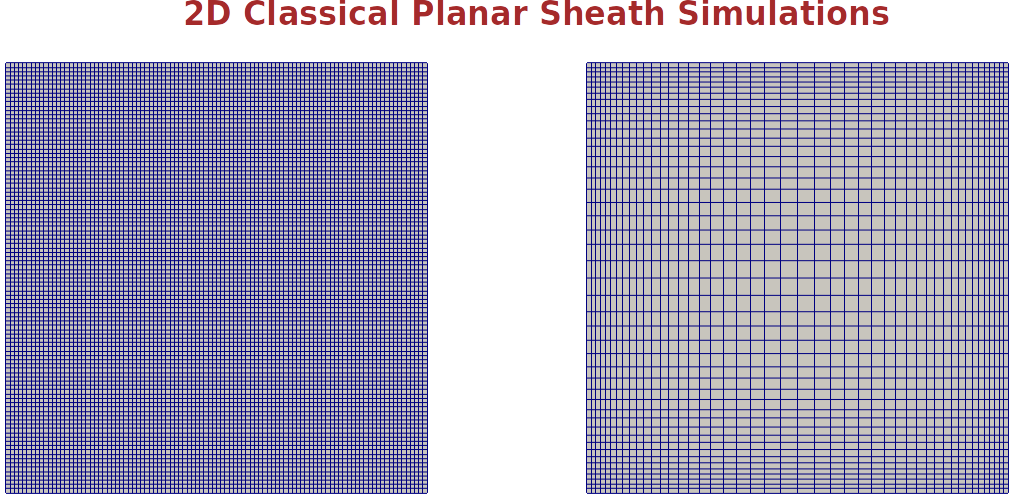
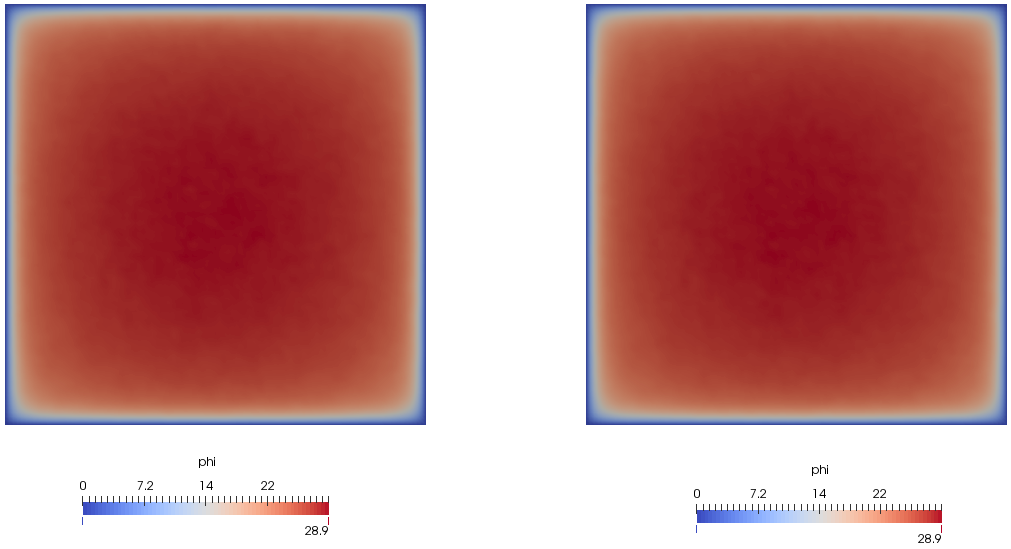
As the primary objective to my doctoral research, I was tasked with developing an anisotropic structured mesh library for hPIC & hPIC2, large scale electrostatic PIC codes targetting plasma material interaction simulations in fusion tokamaks. By default, the PIC code employs a structured uniform mesh for PIC simulations which is an ideal choice considering the trivial and highly efficient PIC operations on such grids. Howvere, the grid sizing in a such meshes is constrained by the requirements in high-gradient regions of the plasma domain. The developed block-structured anisotropic mesh, titled Multi-Block Boundary Layer (MBBL) mesh, offers variable grid-sizing and is also implemented as a fully implicit (stored with minimal memory footprint in the order of few kilobytes) mesh. Additionaly, the MBBL library provides all the PIC capabilitites of uniform grids with insignificant additional performance overheads (~ 10% slower) compared to savings it offers (> 100x element count reduction and >30x runtime reduction).
The MBBL mesh library (PUMImbbl) and implemented MBBL algorithms was originally developed in C programming language for the (MPI based) CPU-only parallel PIC code hPIC. A hybrid CPU/GPU-performant version of the MBBL mesh library, PUMImbbl-GPU, was later developed using Kokkos C++ performance portability framework and integrated with hPIC2 (an extension of hPIC with hybrid CPU/GPU parallel execution).
Capabilities to perform PIC simulations in complex 2D domains (non-convex rectilinear domains) are also added to the MBBL library. Special boundary tracking and trajectory intersection algorithms have been implemented for non-convex domains, thus extending the scope of domains covered by hPIC2 beyond regular rectangular domains. Currently field-solve related developments on non-convex domains are underway currently underway.
NOTE: Both hPIC and hPIC2 are private repositories developed by Laboratory of Computational Plasma Physics at University of Illinois at Urbana-Champaign. Please contact the owner of the repos Dr. Davide Curelli for more information regarding the softwares
>
Two Stream Instability Simulations
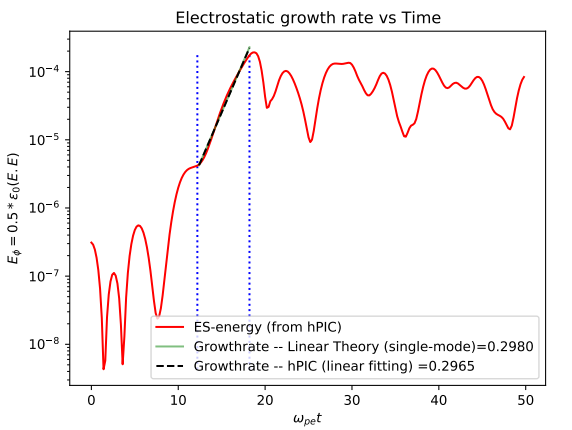
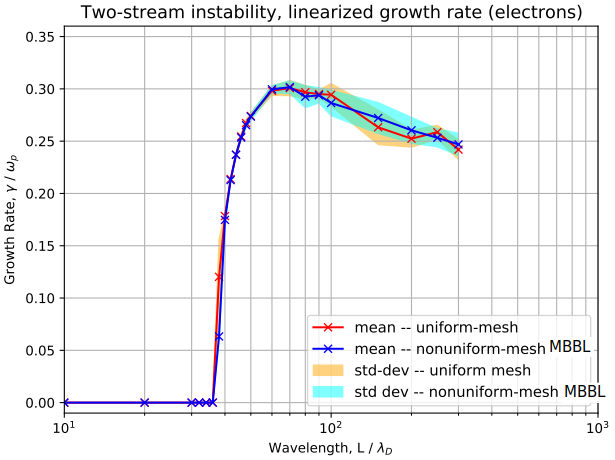
Vortices in phase-space forms due to interactions between electron beams initialized with opposite velocities. Validation tests conducted on non-uniform MBBL meshes confirms growth rates based on linear theory and compares well with standard uniform meshes.

Uncertainty Quantification
Details will be added soonWavelet Finite Element Methods for PDEs
This project is done as part of Dual Degree curriculum for partial fulfillment of requirements for the award of Master's degree in Technology by IIT Madras. The crux of the project involvles finding solutions to PDEs defining a system in wavelet basis. The properties of a family of wavelets (especially their compact support and orthonormality) has made them an excellent choice of basis to the solutions of PDEs. The reason the wavelet approach is chosen over the conventional methods is that wavelets can represent functions at different resolution (thereby obtaining a hierarchy of solution) and its ability to produce refined solution at regions with high gradients (without having to regenerate the whole mesh!). The method is rightly named Wavelet-Galerkin for its similarity to Galerkins weighted residual method (except for the basis used).
The algorithm was tested on a wide range of PDEs and ODEs encountered in mechanics (like 1-D beam and bar elements with load distributions and Simple Harmonic wave in a 2-D plate) and thermodynamics (1-D heat diffusion equation and 2-D Poissons equation). Wavelet-Galerkin method showed excellent converegnce for these problems. See my master's thesis for more details.
Modelling, Simulation and Control of a Serial-Manipulator
This project involves reverse engineering a now-obsolete industrial robot (Mitsubishi RM-501) and customizing it to perform a minimally invasive orthopedic surgery. The spotlight of the project was to "establish the method of customizing outdated industrial robots as a cost-effective alternate to modern medical robots". In order to demonstrate the proof of concept, the first step of the project involved making the robot follow a pre-defined path.
The exact 3-D model of the 5-axis robot was initially created in SolidWorks environment. The same was imported into ADAMS software for dynamic analysis. A MATLAB code was written which takes the discretized coordinates as input and gives the 5 Joint Torques as the output. A SIMULINK module was created, linking the MATLAB code to ADAMS and thus the co-simulation is performed. A control system was also incorporated into the SIMULINK module for optimized performance under disturbances. Real-time simulations and validations were performed for various user-generated paths. This aspect of the project was accepted/presented at ICMME-2016 (published in the conference proceedings).